









Send Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

Modern navigation has the requirement that the system can obtain the motion information of the carrier in real time and accurately. In the field of integrated navigation, the navigation system combined with satellite navigation (currently the most commonly used GPS) and strapdown inertial navigation (SINS) can make up for the shortcomings of individual navigation, and has the advantages of high precision, low cost and simple structure. It has become the most popular research direction. The GPS/SINS integrated navigation generally uses the position and velocity as the quantity measurement to correct the inertial navigation system. With the gradual development of the GPS orientation system, the full combination method of attitude, position and speed as the volume measurement is becoming a research hotspot. According to the mechanism and characteristics of GPS/SINS full-composite navigation system, this paper designs a reliable information fusion technology on the navigation computer platform based on DSP+FPGA. The related experiments prove that the system has good effect.
This article refers to the address: http://
Integrated navigation system hardware and software design
Navigation computer overall design
In the strapdown inertial navigation system, the gyroscope, accelerometer, electronic circuit and metal body are collectively referred to as the inertial measurement device (IMU), which is the core component of the whole system. In this paper, the navigation system adopts the integrated and modular design of the convenient outdoor sports car experiment. The navigation computer is fixed in the IMU device through the interface, and the computer and the IMU are easily replaced. In this system, the IMU data update rate is set to 200 Hz, and the GPS data output frequency is 1 Hz. Therefore, the computer must be able to complete the entire system algorithm operation within 5 ms. Such a rate requirement makes it impossible to satisfy the system real-time performance by simply adopting a core processor method. Requirements, so the computer in this system uses DSP + FPGA dual-core design, DSP uses TI's TMS320C6747, TMS320C6747 has high-performance floating-point computing power, the highest frequency can reach 450MHz, can achieve high-speed computing; and FPGA model is Xilinx The company's XC3S500E. The hardware structure of the system is shown in Figure 1. Among them, DSP6747 is mainly responsible for data processing algorithms such as IMU solution and Kalman filter. FPGA mainly completes external interface expansion (2 RS232 ports, 1 RS422 port), data acquisition and transmission. The function of logic timing control.
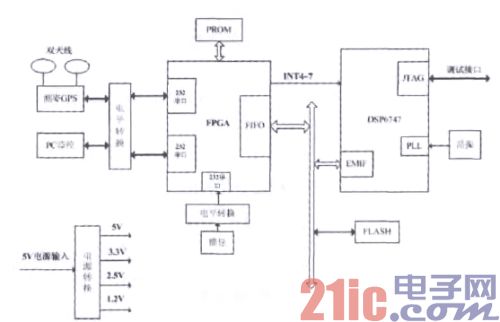
Figure 1 navigation computer structure
Navigation system software design
Navigation computer software design must meet the requirements of real-time and accuracy. After the computer is powered on, the initialization of the whole system will be performed. After the adoption, the strapdown inertial navigation algorithm will be started. The integrated navigation algorithm will calculate the GPS data as the initial data after the GPS data is acquired. If the GPS data loss occurs, the system will run separately. After the inertial solution calculation, the solved data is sent to the Kalman filter for processing. System software flow chart shown in Figure 2.

Figure 2 system software flow chart
Integrated navigation system algorithm
(1) State equation of combined navigation
At present, the GPS/SINS integrated navigation method is mainly divided into loose combination and tight combination. The loose combination mostly adopts the position and speed combination mode, and the dual antenna GPS attitude angle is added as the quantity measurement to realize the full combination mode. Its state equation is shown in equation (1):
Where F(t) is a state transition matrix of order 18*18; W(t) is a state noise vector of 18 dimensions; the following equations give the system noise properties of the equation of state:

The system state X(t) is selected as:
Among them, δL, δλ and δH are longitude, latitude and height errors, and δVe, δVn and δVu are respectively
The velocity error in three directions of northeast sky, Φe, Φn, Φu is the platform error angle, εbx, εby, εbz, εrx, εry, εrz, Δax, Δay, Δaz are the gyro constant drift, correlation drift and accelerometer Zero bias.
The error equation for the misalignment angle is:

The speed error equation is:
The position error equation is:

(2) Measurement equations of integrated navigation system
Since the system uses the data given by the directional GPS as the correction data, the system measurement value adds the attitude information based on the position and velocity values. The position measurement is the latitude, longitude and altitude difference given by the inertial navigation system and the GPS. The corresponding velocity measurement is the difference between the inertial navigation system and the coordinates given by the GPS in the inertial system, and the inertial navigation system The attitude difference given by the dual antenna GPS is used as the third set of measurements.
The inertial navigation system and GPS position measurement information are represented by true value and error in the geographic coordinate system as follows:

In the formula, L, λ, and h represent the true position of the carrier, and Ne, Nn, and NH are the positional errors of the GPS northeast direction.
The position measurement equation is as follows:

Similar to the form of the position measurement equation, the velocity measurement equation is expressed as follows:

The following equation is the attitude measurement equation:

The combination of (2), (3) and (4) can be used to obtain the measurement equation of the whole system as follows

In this paper, Kalman filtering algorithm is used to fuse GPS and IMU data. The equations after discretizing equations (1) and (8) are:

The one-step prediction equation of state is:
The state estimation equation is:
The filter gain is:

Calculate the one-step prediction mean square error:

Then the mean square error error estimate:

test results
In order to verify the feasibility of the dual-antenna GPS/SINS integrated navigation system proposed in this paper, a sports car experiment was carried out in a certain place in Nanjing. The attitude GPS module has a positioning accuracy of less than 5 m, a speed accuracy of 0.1 m/s, and a heading accuracy of 0.1°. The IMU constant drift is less than 0.1 ° / h. In the process of sports car, high-precision GPS is used as the real value, and the combined navigation system output value is compared with high-precision GPS data. The inertial navigation data is solved every 5 ms in the whole system, and the frequency of data correction by the Kalman filter algorithm is 1 time/s. The navigation computer output data is stored in the file during the sports car process, and the data is processed by MATLAB. Figure 3 shows the difference between the output data of the integrated navigation system and the high-precision GPS at the same time in a sports car. The result is shown in Figure 3.

Figure 3 Integrated navigation and GPS error curve
It can be seen from Fig. 3 that the integrated navigation system proposed in this paper has higher positioning accuracy under dynamic conditions. From the comparison with high-precision GPS data, the positioning error of this system is within 4m, and the speed error is 0.1m/ s or so, reached the requirements of the system, fully meet the practical application needs.

November 16, 2024

September 18, 2023

June 28, 2024

June 28, 2024
이 업체에게 이메일로 보내기
November 16, 2024
September 18, 2023
June 28, 2024
June 28, 2024
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.